Jul 2026TalkThree oral presentations: two at the World Congress of Biomechanics (Vancouver, July 12) and one at the UBC Balance and Falls Research Centre Inaugural Research Symposium (July 10).
May 2026AwardWon 2nd place prize for talk “Biomechanics in the Wild” at the University of Victoria.
2025PositionStarted Post Doctoral Scientist role at University of Victoria (wearable IMU systems for fall risk).
2025GrantAwarded $15,000 MITACS Lab2Market grant for Core Motion market research.
2024TranslationalCore Motion developing wearable device for ACL rehabilitation.
2024PositionContracting for Lululemon testing economy of sports bras.
Fractional R&D for Engineering Teams
I work as an embedded, part-time R&D resource for teams that need senior biomechanics, computer vision, and machine learning expertise without a full-time hire. Previous work with Meta, Harvard, and lululemon. Tell me what you're building and I'll reply within 48 hours.
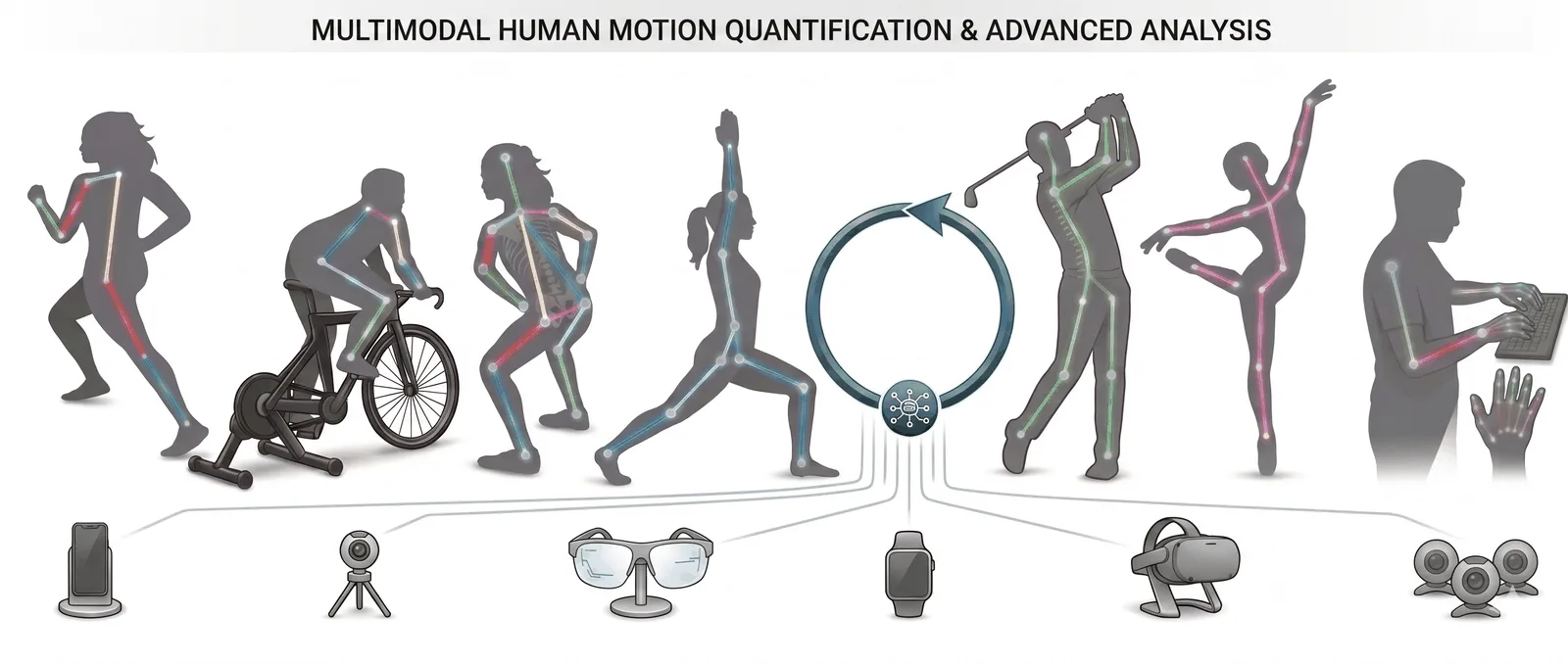
My research combines experimental biomechanics, computer vision, and machine learning to democratize access to movement analysis. I believe everyone deserves access to high-quality movement data — not just those with access to expensive labs. I build open-source tools that bring research-grade analysis to any camera, any clinic, and any community. I am passionate about creating opportunities for students to develop new technologies and address fundamental questions about how humans move.
01
Video-Based Biomechanics
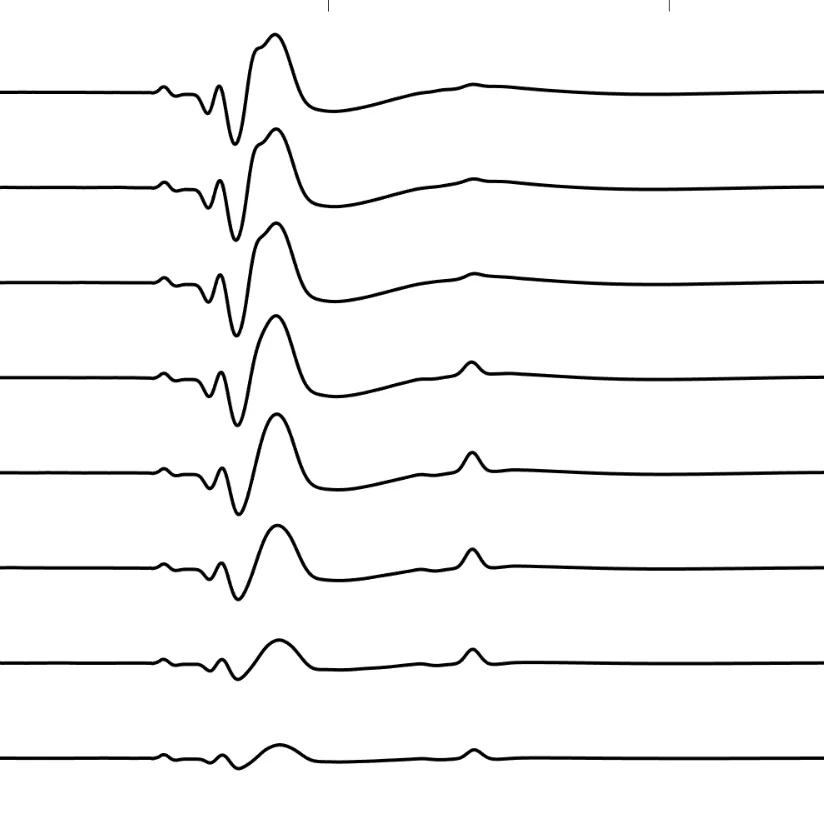
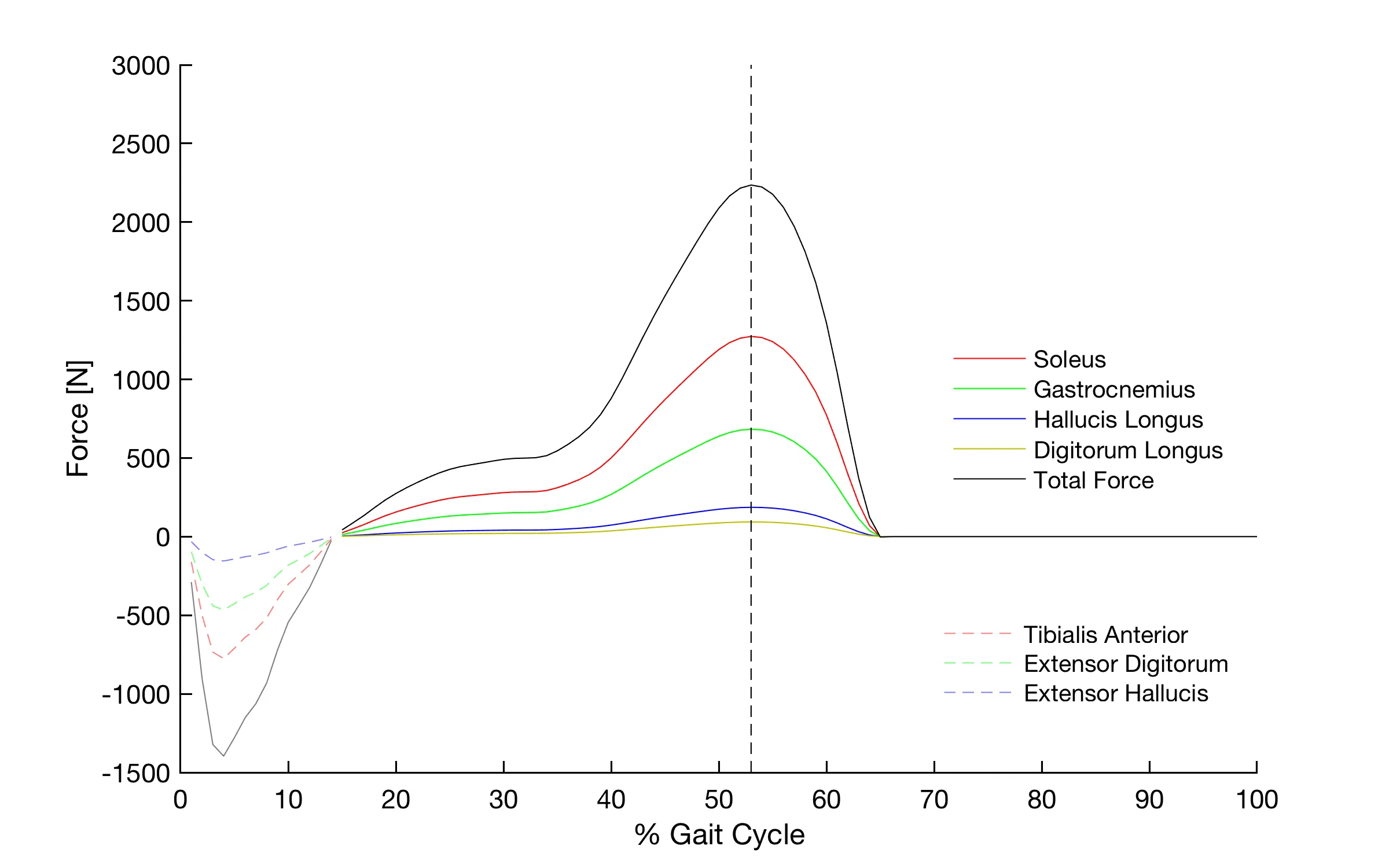
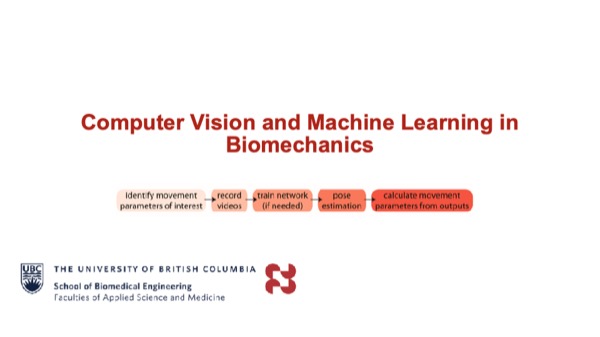
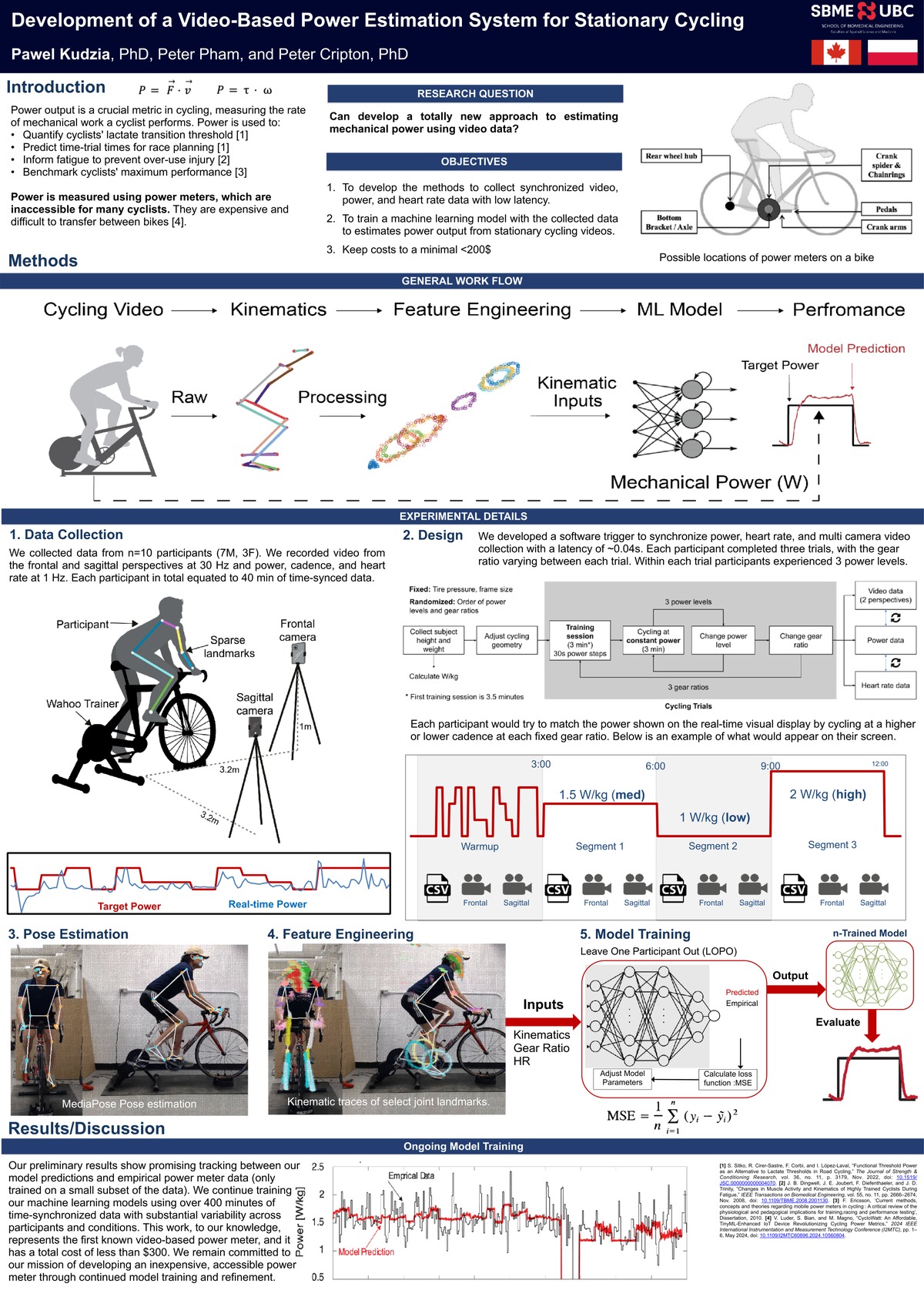
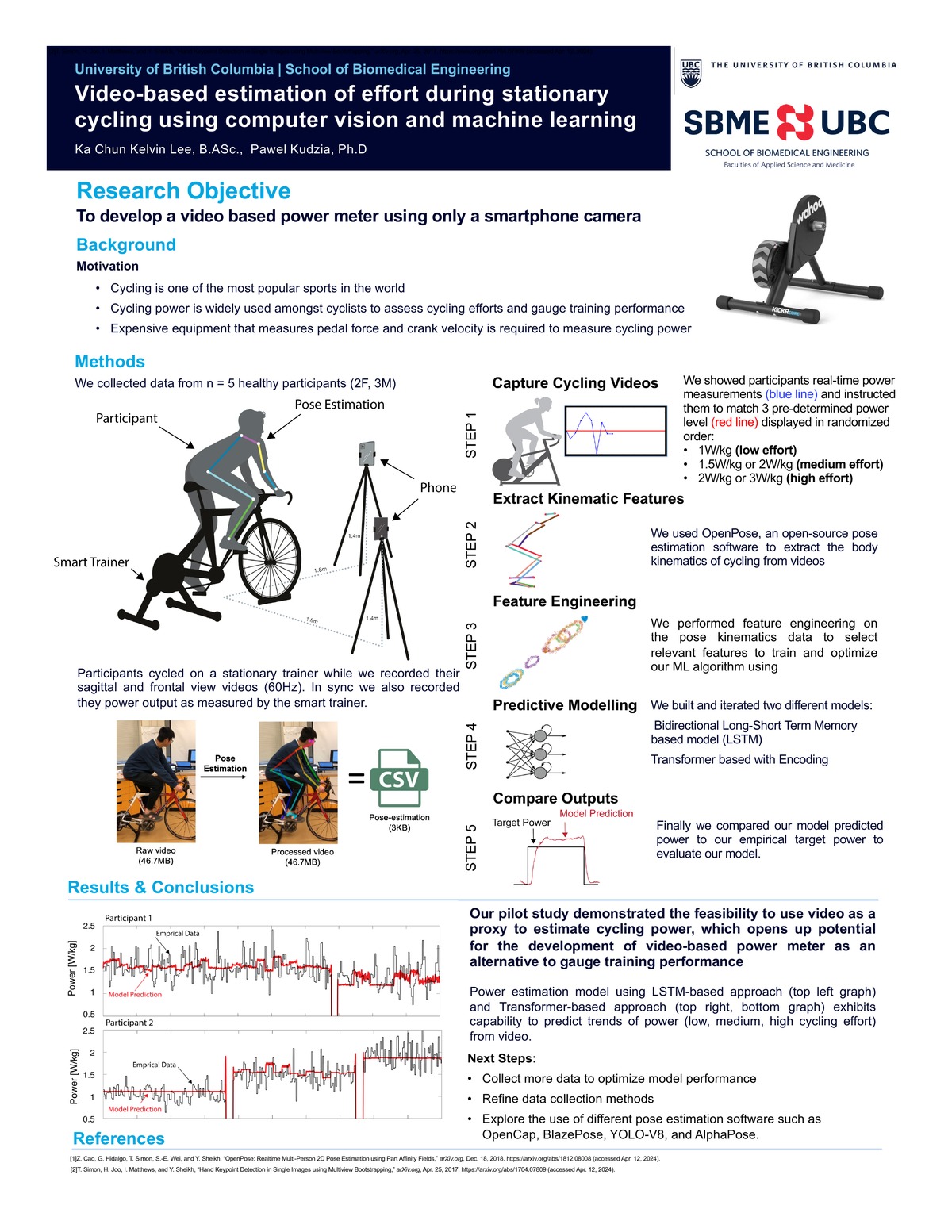
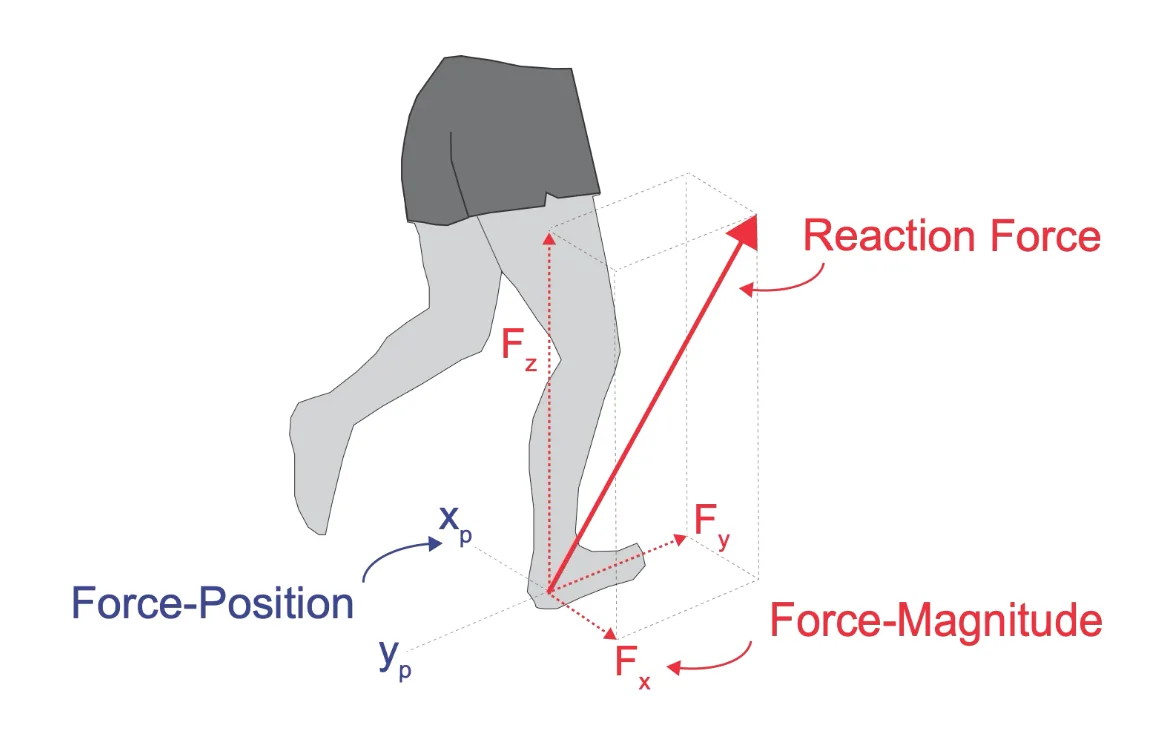
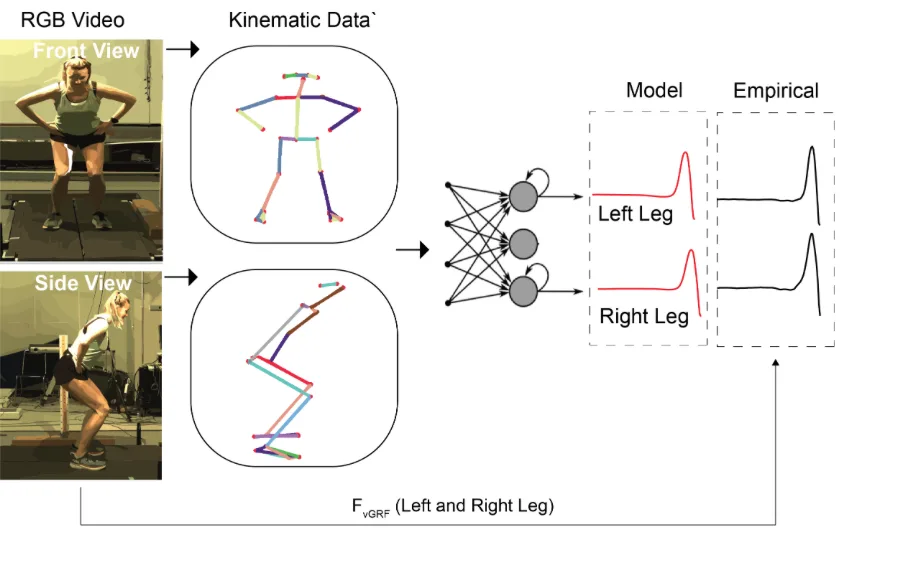
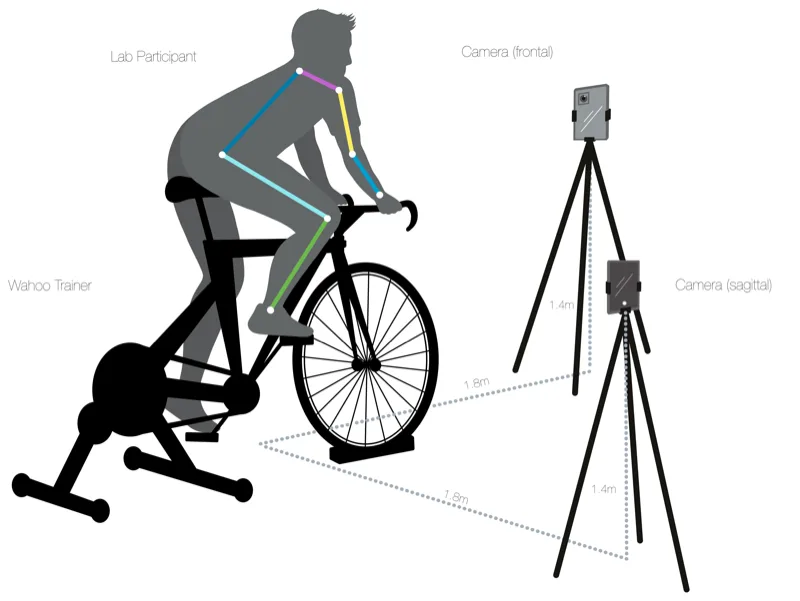
Standard video cameras are everywhere — in phones, clinics, and gyms. I use video as the primary medium for collecting movement data, then apply computer vision and machine learning to extract metrics that traditionally require expensive lab equipment: ground reaction forces, joint kinematics, and full-body kinetics. Research-grade biomechanics from a single camera.
Video-driven health tools for real-world deployment. 3D body scanning from pose estimation enables rapid anatomical reconstruction. Real-time biofeedback systems support fall prevention, stroke recovery, and sport rehabilitation. The goal is to move movement science out of the lab and into the clinic, the gym, and the home.
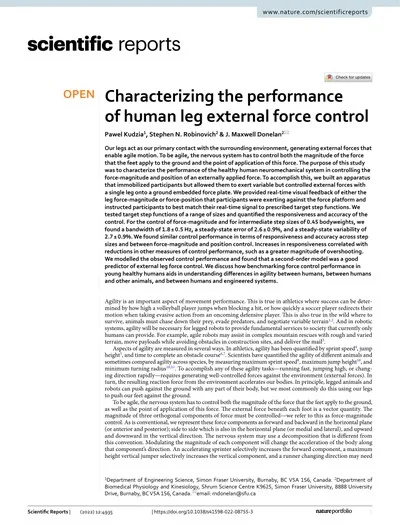
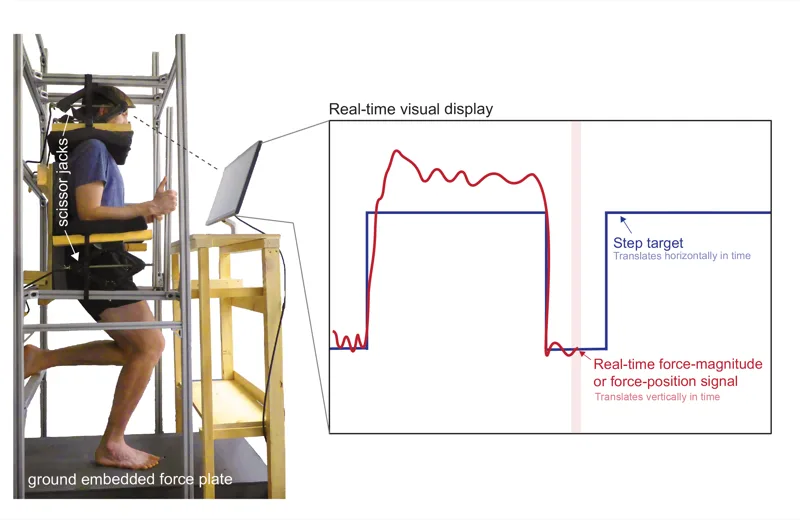
Characterizing how the nervous system controls leg forces and adapts across the lifespan. Custom experimental rigs quantify force control limits. Physics-based models reveal fundamental constraints on movement performance. This work informs the biofeedback design behind the video and wearable tools above.
NeuromechanicsEMGComputational ModelsAging
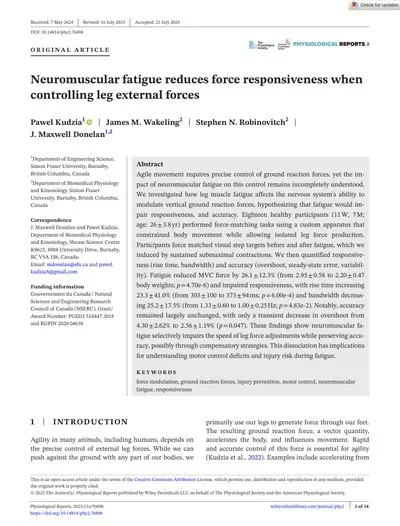
Published in Physiological Reports and Nature Scientific Reports
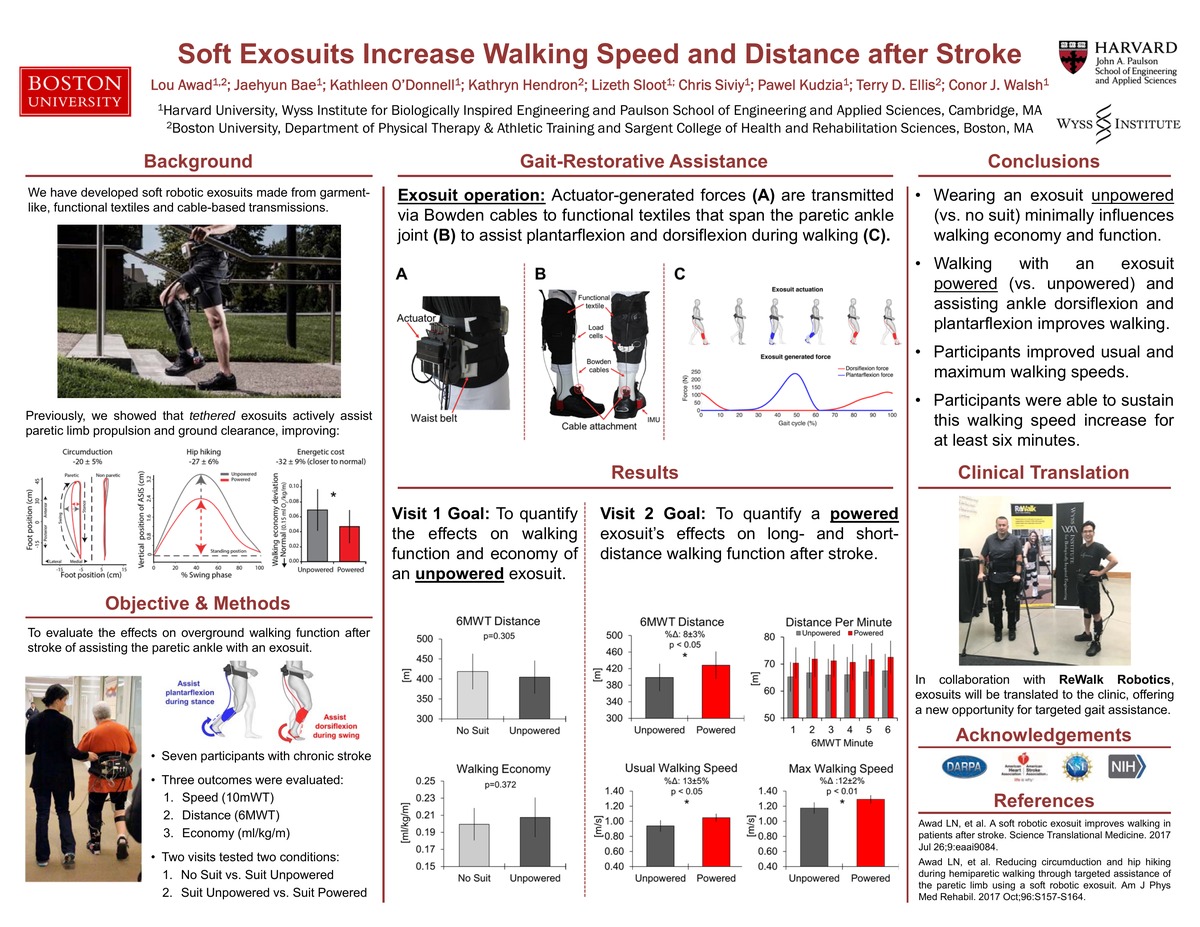
Wearable robot improving walking speed and distance after stroke. Published in Science Translational Medicine. 1000+ citations. IEEE ICRA Best Paper Award.
Wearable Technology
Core Motion: ACL Rehabilitation
Wearable biofeedback device for real-time biomechanics analysis during ACL rehabilitation.
Mathematical Modeling
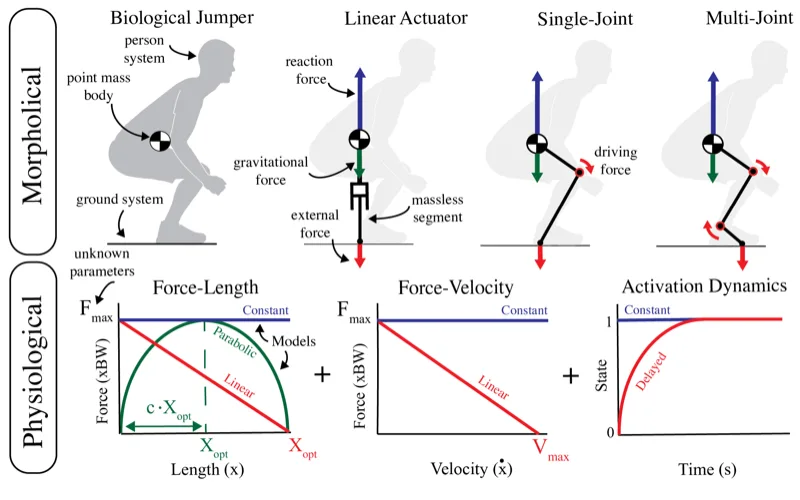
Models of Leg Force Production
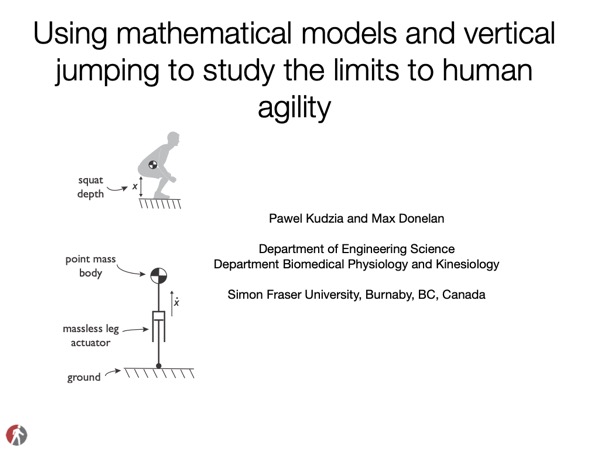
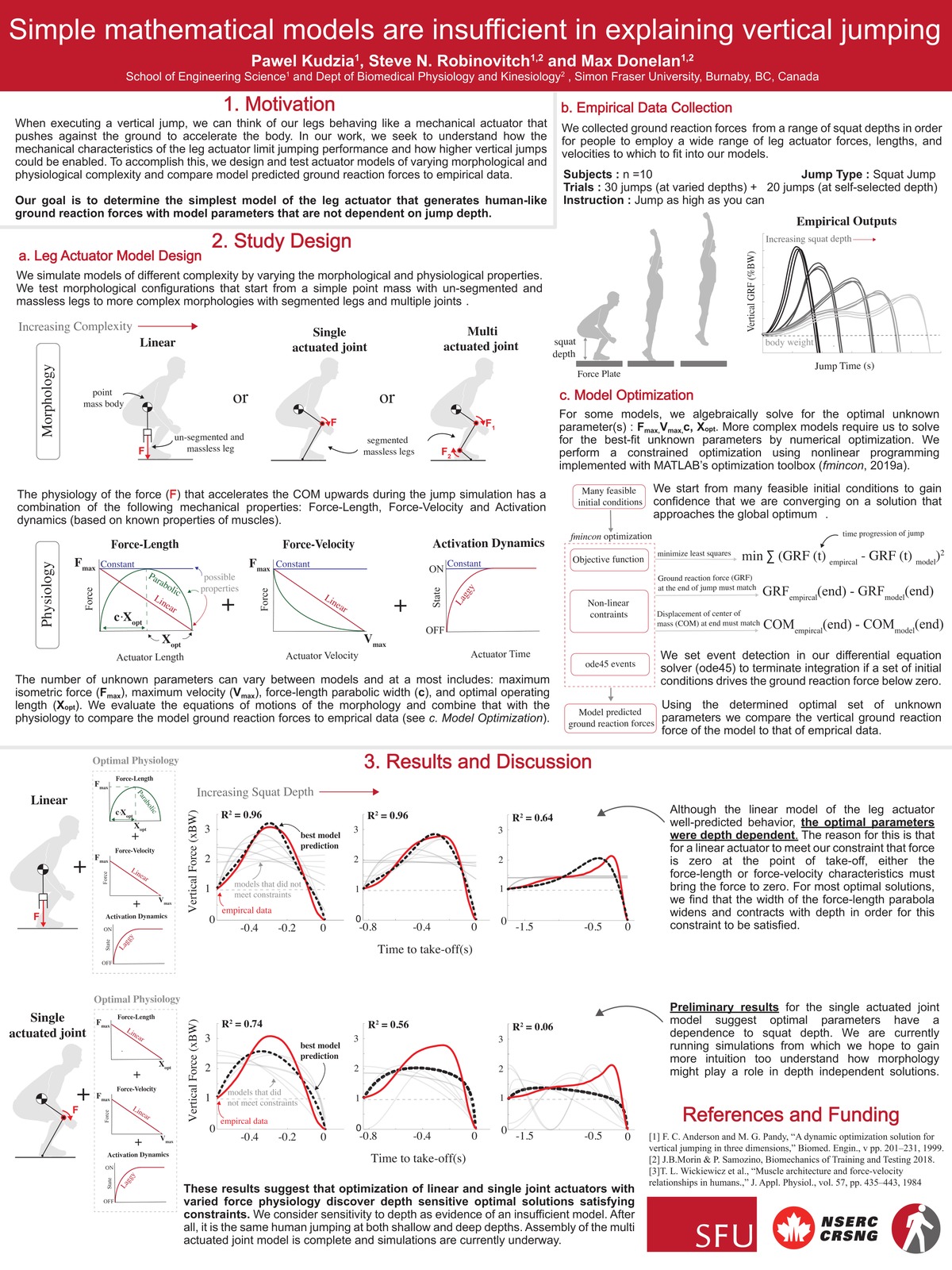
Physics-based models predicting ground reaction forces during vertical jumping. Revealed force-velocity constraints on performance.
Deep Learning
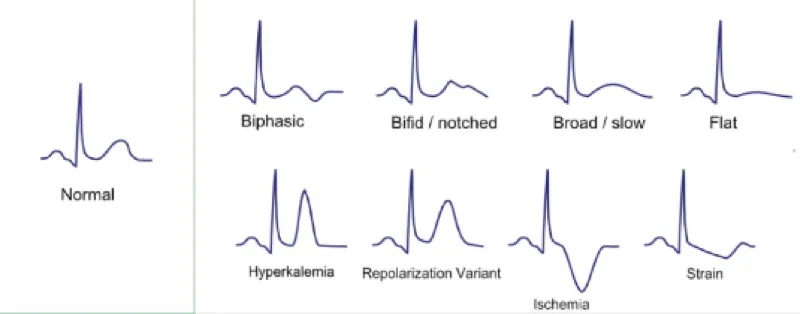
ECG Arrhythmia Classification
Multiple deep neural network architectures benchmarked for automated ECG signal classification on the MIT-BIH database.
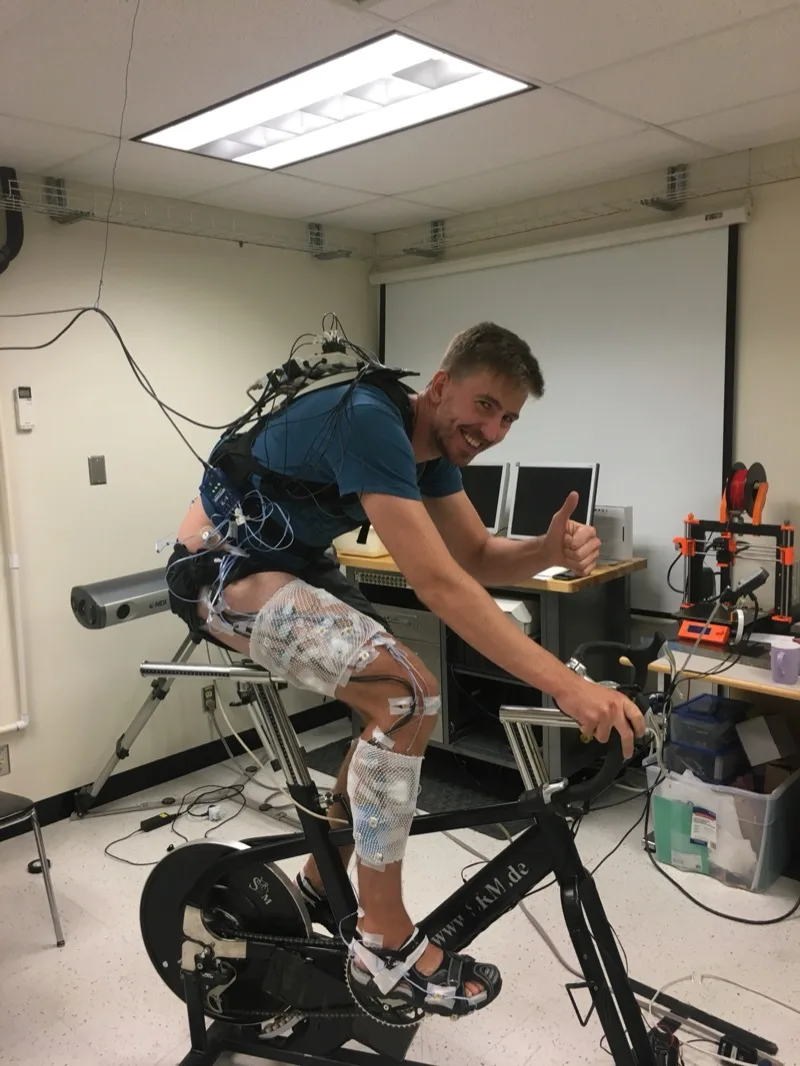
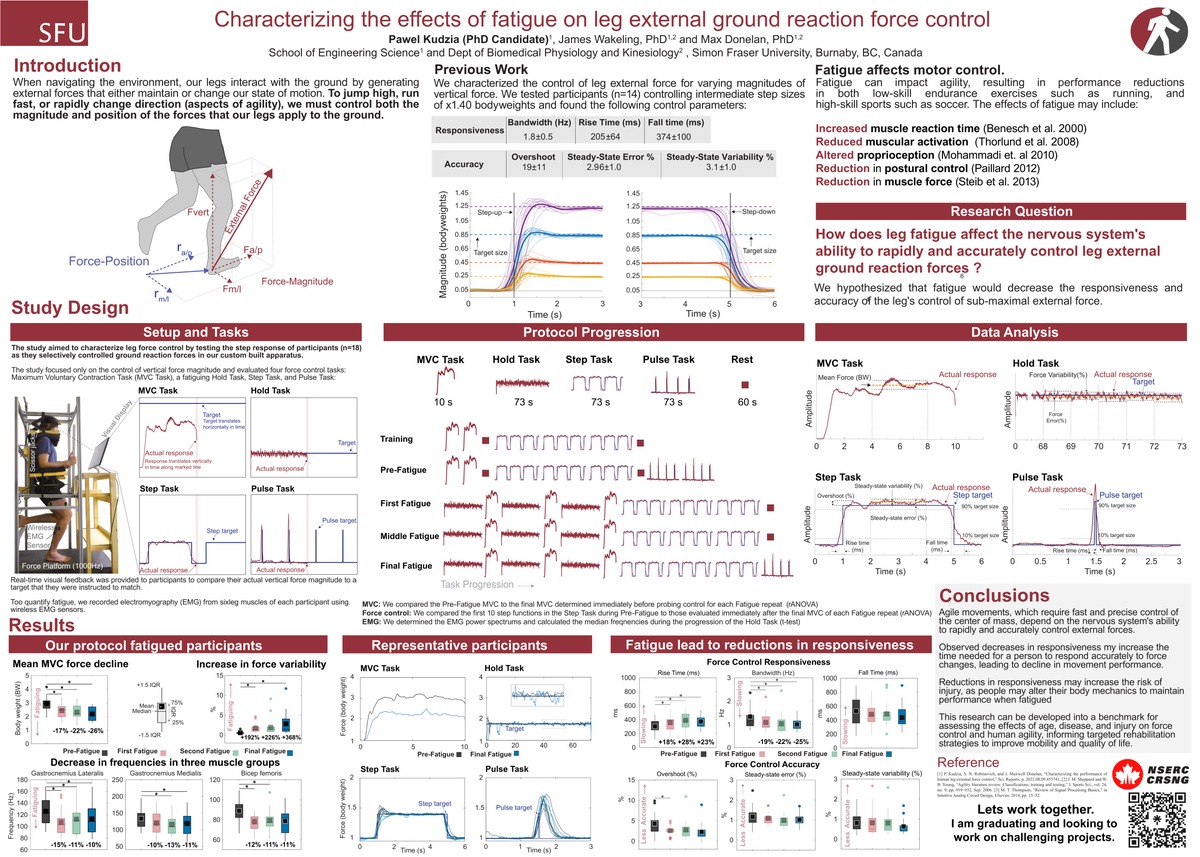
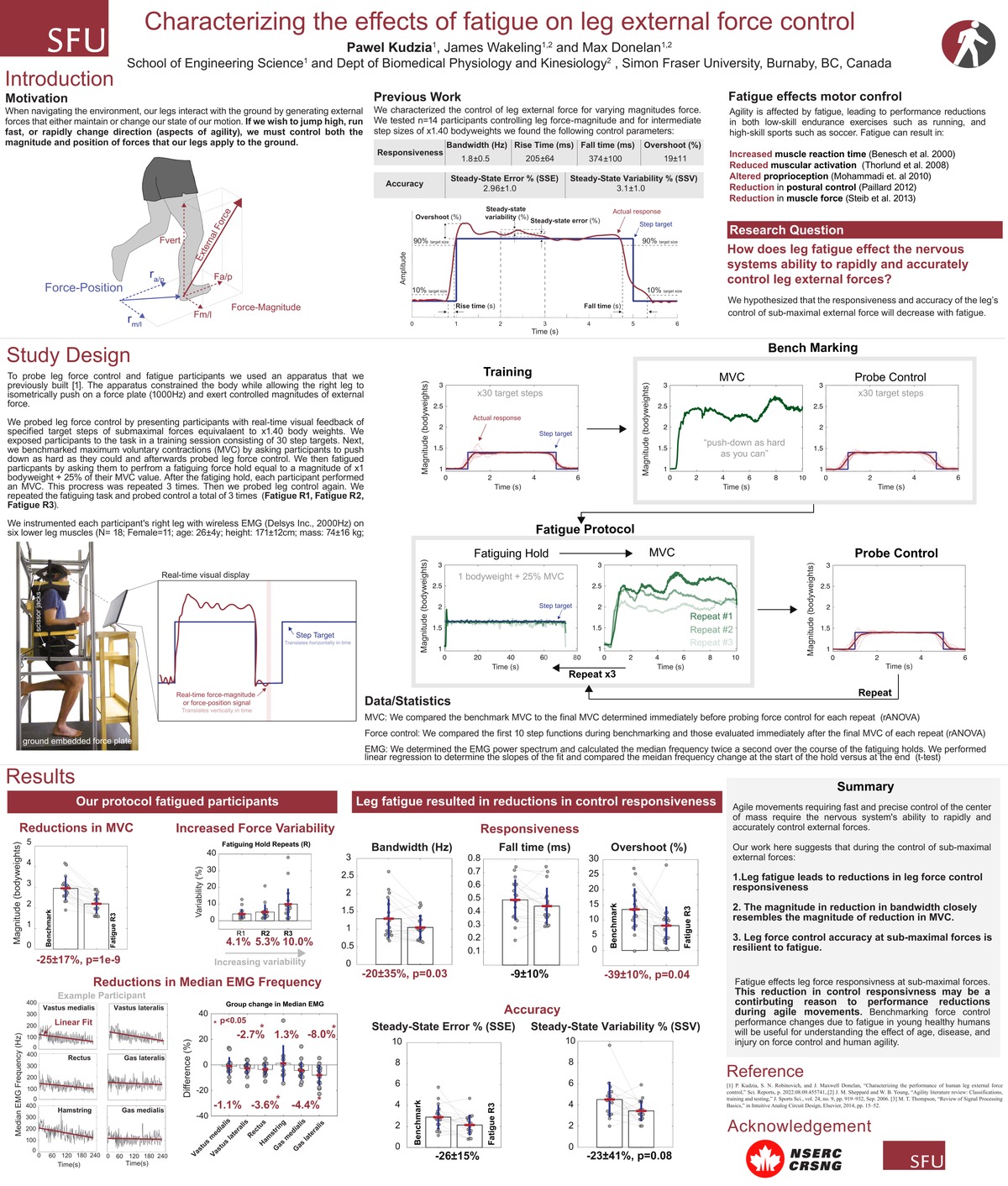
Built a custom force platform system to measure how muscle fatigue changes the way people control leg forces. Designed the experiment, ran participants through fatigue protocols, and analyzed the neuromuscular data.
Used computer vision to track head and torso motion during side impacts. Built a video analysis pipeline to quantify how muscle co-contraction protects the neck during collisions.
Kudzia P., Booth G.R., Reynier K., Panzer M., Cripton P.A. Journal of Biomechanical EngineeringIn Review (Preprint)
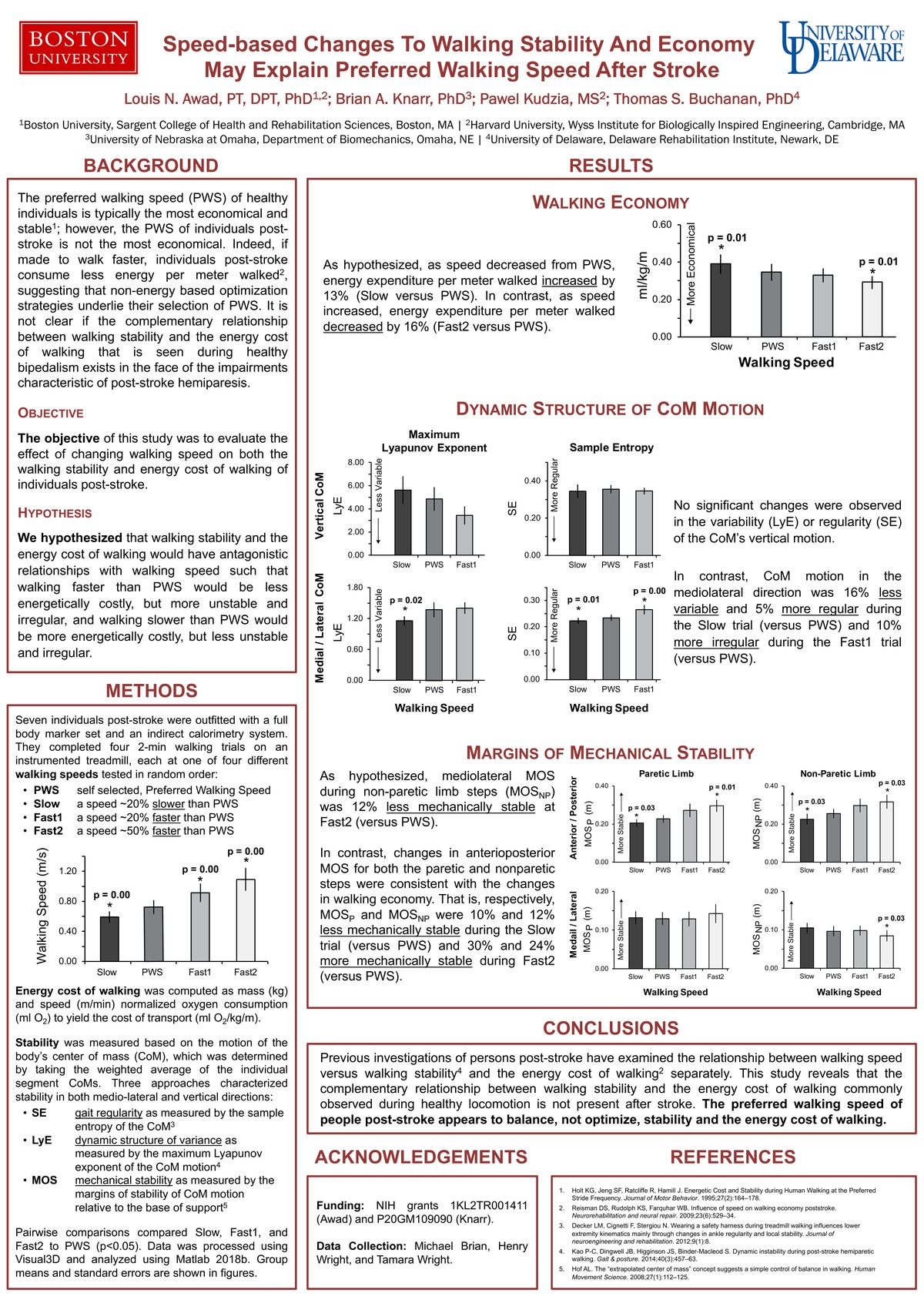
Analyzed clinical walking data from stroke patients to understand the tradeoffs between walking speed, energy cost, and balance. Quantified how these factors interact during rehabilitation.
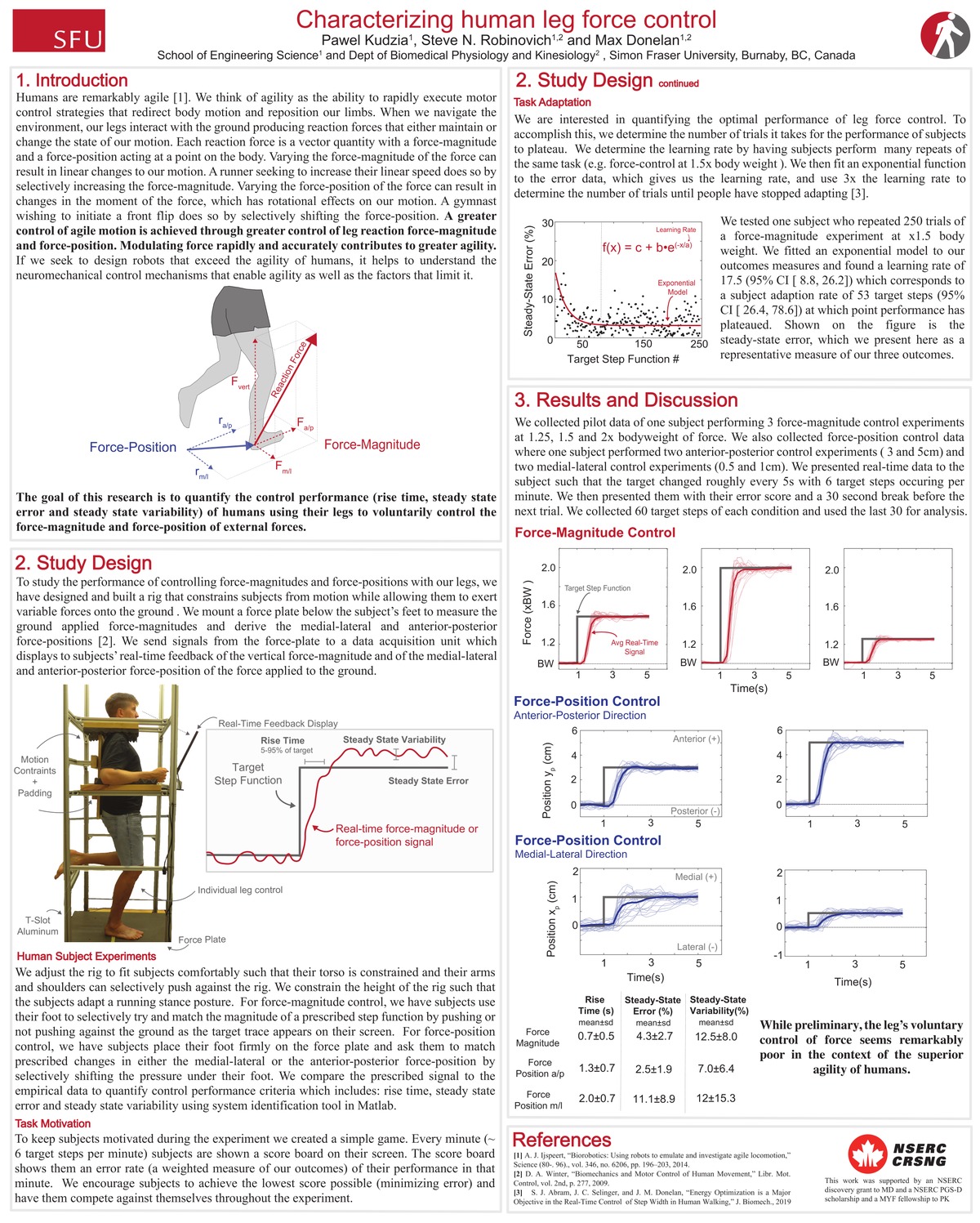
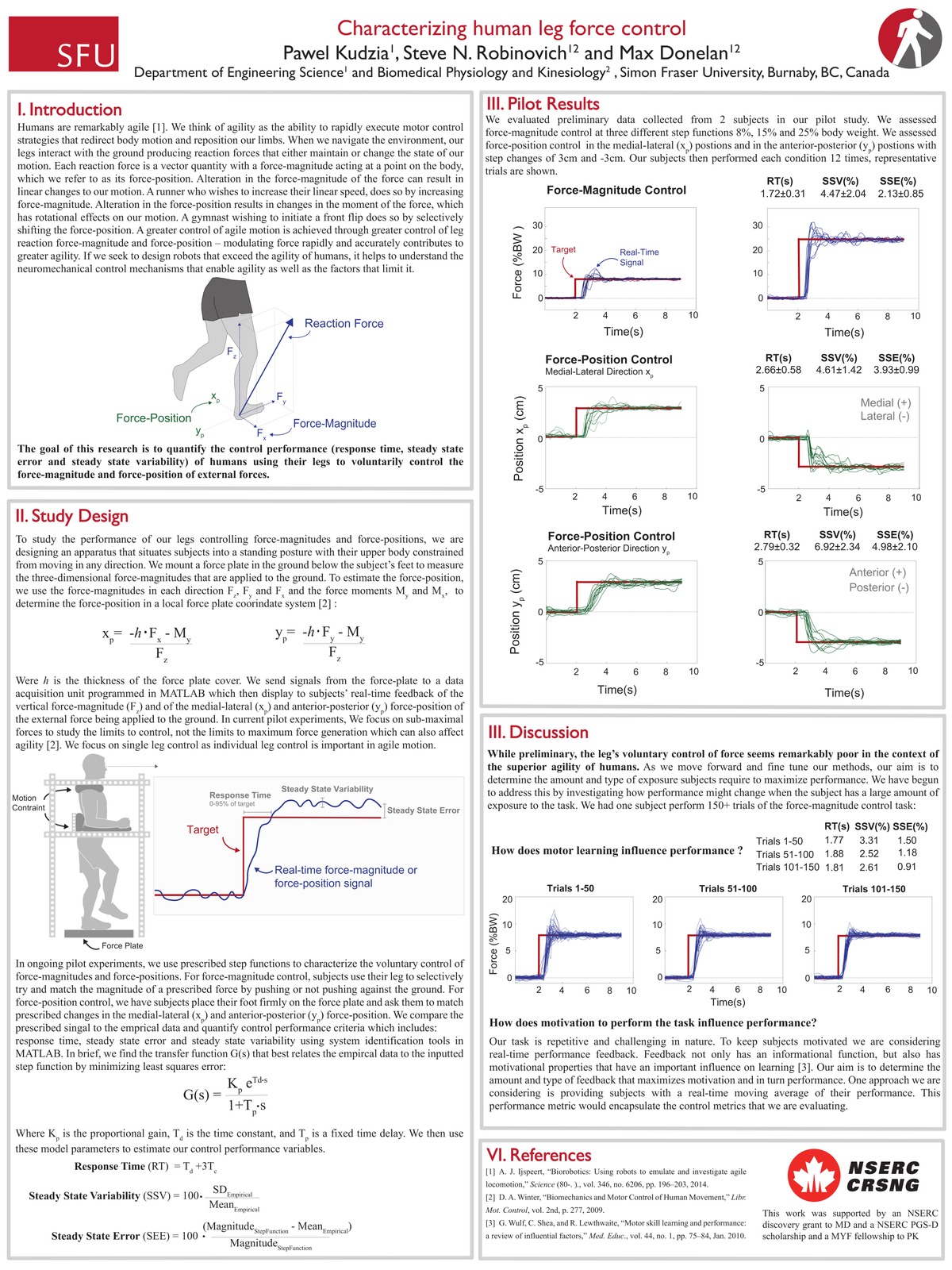
Designed and built a custom force control apparatus to test the limits of human leg force production. Collected and analyzed data from participants performing precision force tasks under varying conditions.
Kudzia P., Robinovich S., Donelan M. Nature Scientific Reports2022
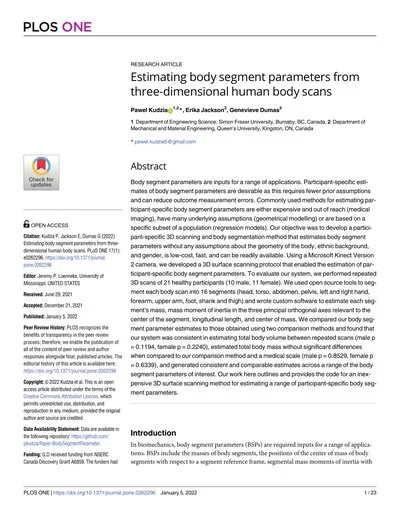
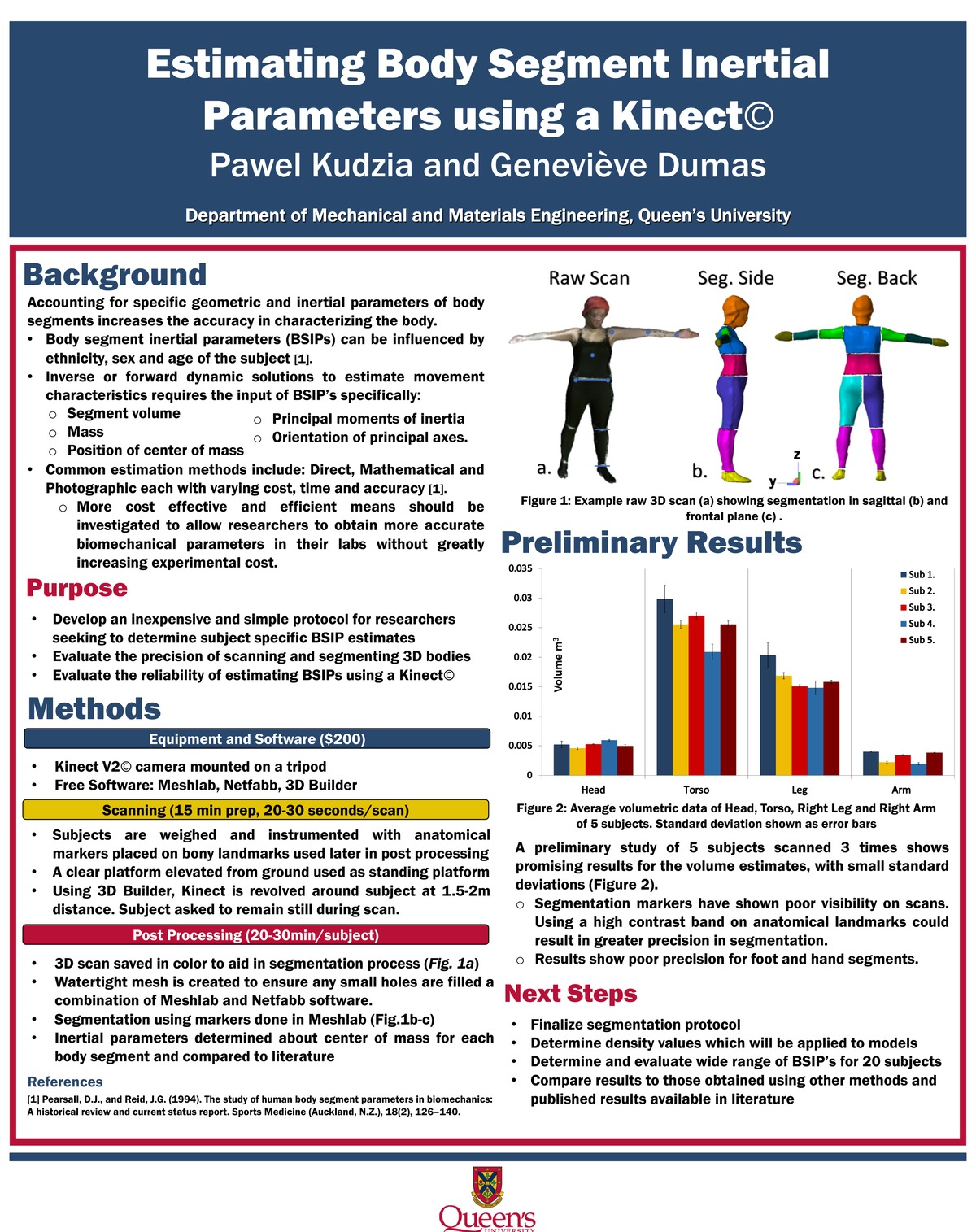
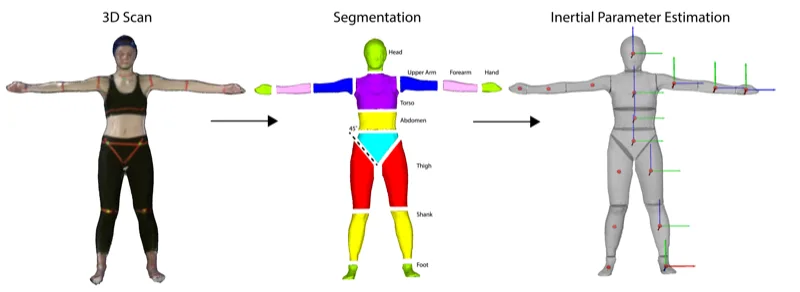
Built a processing pipeline to extract biomechanical body segment parameters from 3D body scans. Replaced traditional regression methods with direct measurement from point cloud data.
Kudzia P., Jackson E., Dumas G. PLoS ONE 17(1): e0262296. 2022
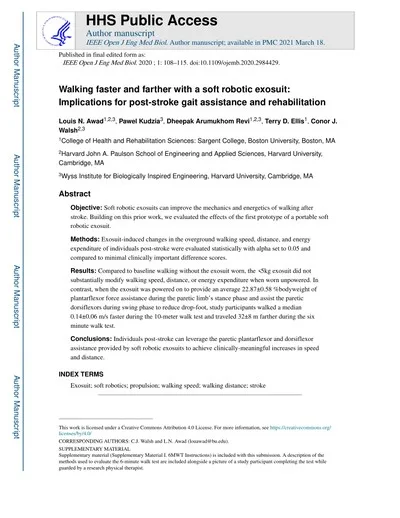
Ran clinical trials testing a wearable soft robot on stroke survivors. Measured gait improvements across speed, distance, and metabolic cost. Managed participant recruitment and data collection.
Awad L., Kudzia P., Revi D., Ellis T., Walsh C. IEEE Open Journal of Engineering in Medicine and Biology, 1, 108-115. 2020
Developed and tested a portable soft exosuit for ankle assistance. Integrated sensors, actuators, and control systems into a lightweight wearable package for use outside the lab.
Bae J., Siviy C., Rouleau M., Menber N., O'Donnell K., Geliana I., Atber M., Ryan D., Kudzia P., Ellis T., Walsh C. IEEE ICRA, Brisbane, Australia. 2018Best Paper Award - Medical Robotics
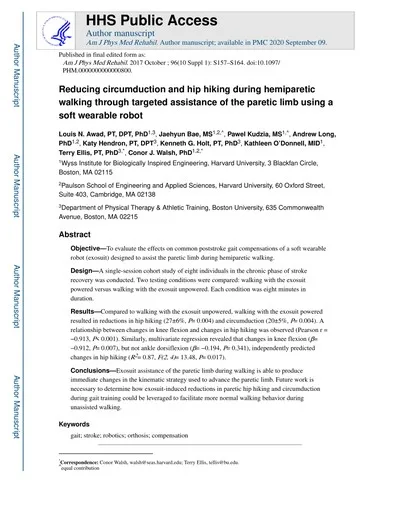
Led clinical experiments testing how a soft exosuit reduces abnormal walking patterns after stroke. Collected motion capture, EMG, and metabolic data across multiple gait conditions.
Awad L., *Kudzia P., *Bae J., et al. American Journal of Physical Medicine & Rehabilitation, 96(10). 2017(*shared first authorship)
Part of the team that built and validated a soft wearable robot for stroke rehabilitation at Harvard. Ran gait analysis experiments in the lab and community settings. Published in one of the top translational science journals.
Awad L., Bae J., O'Donnell K., ..., Kudzia P., et al. Science Translational Medicine 9(400). 2017
Oral presentations at international conferences and research symposia. Posters listed separately.
2026 Upcoming
Validating wearable IMU stride length algorithms across graded dual-task walking conditions in older adults with mild cognitive impairment Oral
Kudzia P. UBC Balance and Falls Research Centre Inaugural Research Symposium, Vancouver, Canada. 2026July 10, 2026 · Gateway Health Building
Video analysis of human lateral head impacts reveals muscle co-contraction reduces head excursion relative to torso Oral
Kudzia P., Booth G.R., Reynier K., Panzer M., Cripton P. World Congress of Biomechanics, Vancouver, Canada. 2026AbstractJuly 12, 2026 · 09:30–10:40 · West 205–207 · Session OA32, Experimental Modeling of Injury II
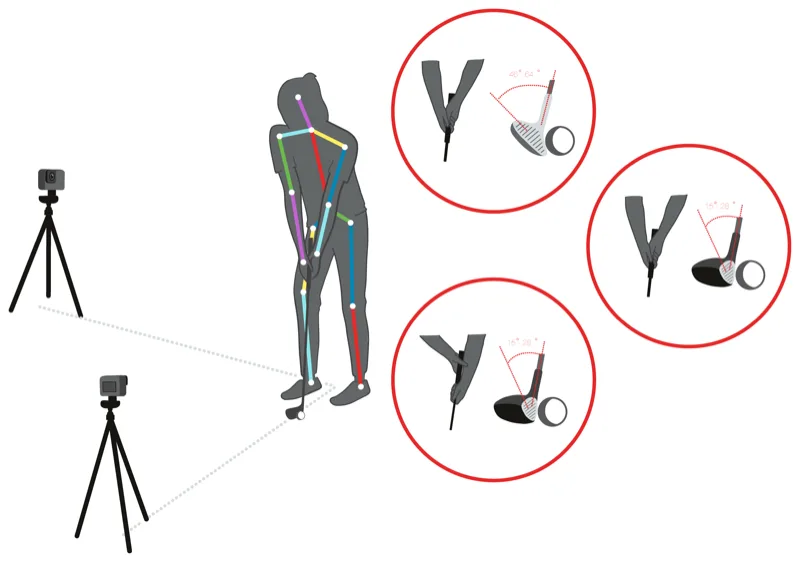
Field-based biomechanical analysis of ski mountaineering using smartphone video and open-source pose estimation Oral
Kudzia P., Clements N., Cripton P. World Congress of Biomechanics, Vancouver, Canada. 2026AbstractJuly 12, 2026 · 11:30–12:40 · West 301 · Session OA42, Field Assessment
2025
Estimating ground reaction forces of gait at various walking speeds from video data Oral
Kudzia P., Wu K., Cripton P. ISB 2025, Stockholm, Sweden. July 2025Slides
Advancing biomechanical estimation techniques for ski mountaineers in natural mountain environments Oral
Clements N., Kudzia P. West Coast Biomechanics Conference, Vancouver. May 2025
2024
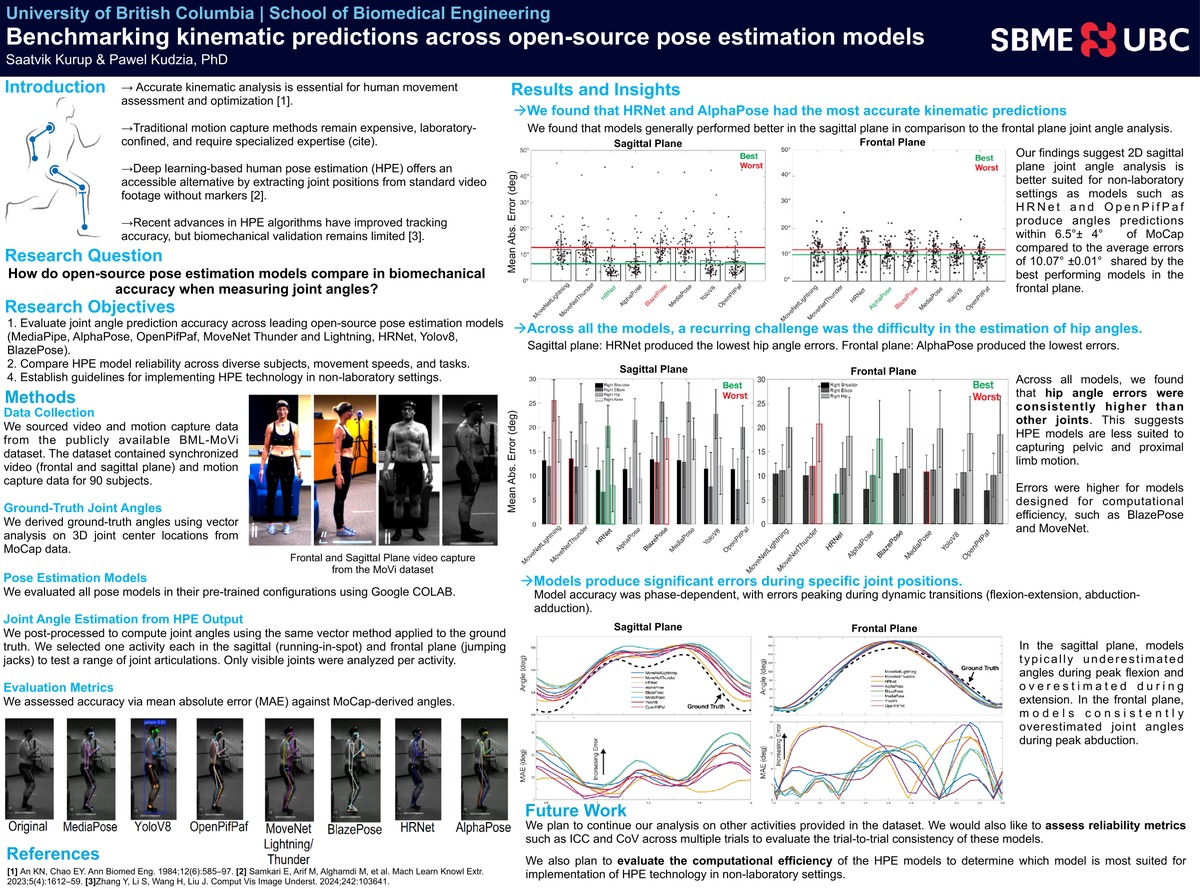
AI in biomechanics Oral
Kudzia P., Bajic I., Donelan M. IncreaseBC, BC Children's Hospital, Vancouver. April 2024Best Oral PresentationSlides
2021
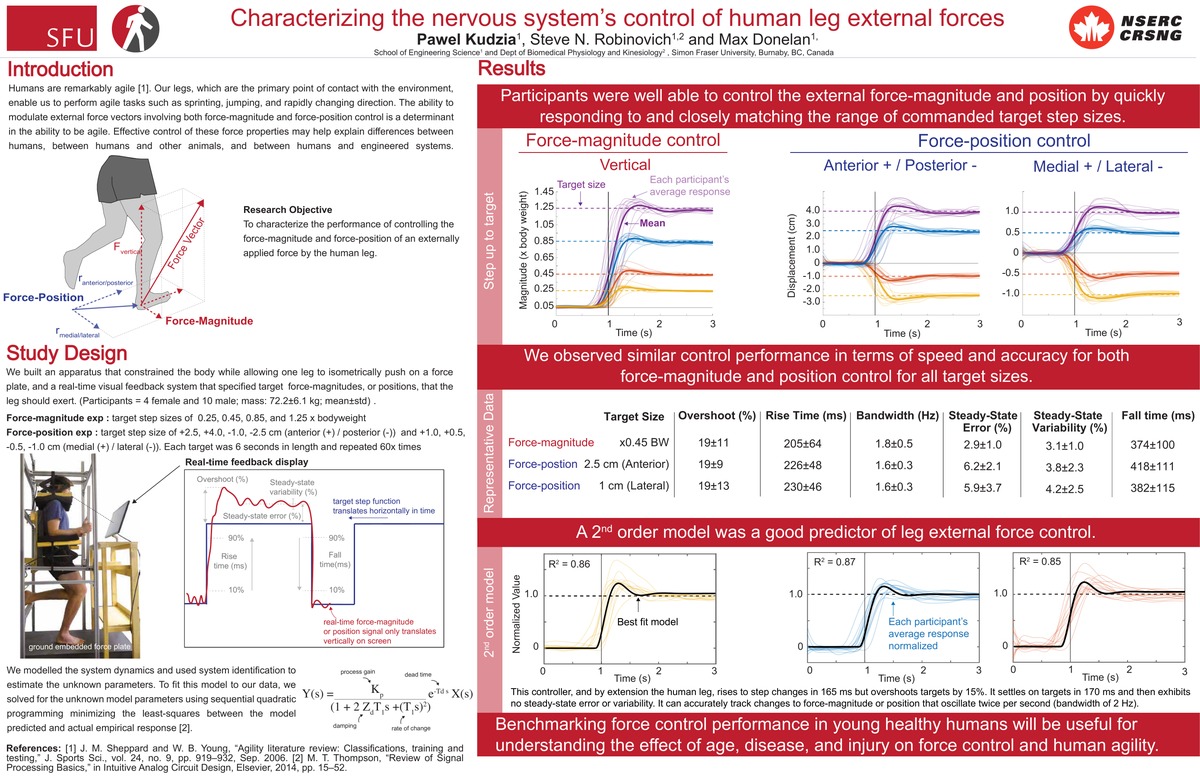
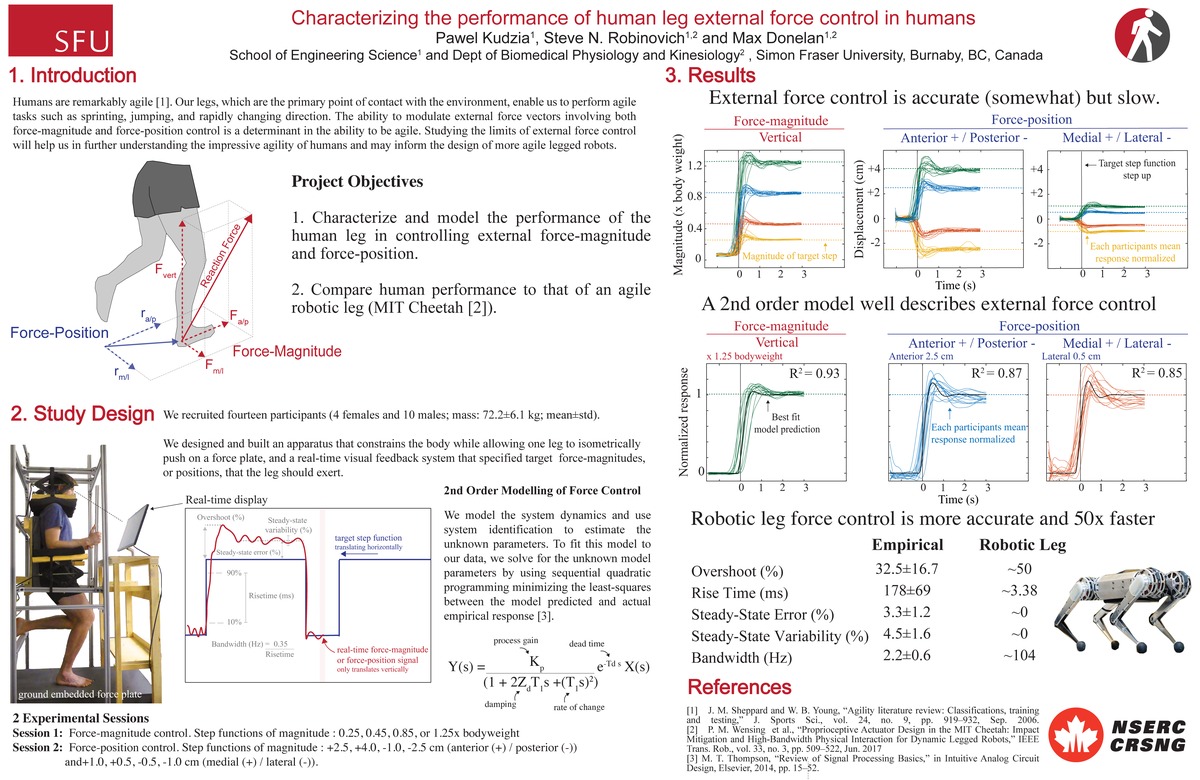
Characterizing the control of human leg external forces Oral
Kudzia P., Robinovitch S., Donelan M. Canadian Society of Biomechanics. Virtual Conference2021
2020
The limits of controlling external force vectors Oral
Portable soft exosuit for paretic ankle assistance in overground walking after stroke Oral
Bae J., Siviy C., Rouleau M., Menard N., O'Donnell K., Galiana I., Athanassiu M., Ryan D., Sloot L., Kudzia P., Ellis T., Awad L., Walsh C. Dynamic Walking, Pensacola, FL. 2018
A lightweight and efficient portable soft exosuit for paretic ankle assistance in walking after stroke Oral
Bae J., Siviy C., Rouleau M., ... Kudzia P., et al. IEEE ICRA, Brisbane, Australia. 2018Best Paper Award in Medical RoboticsPaper
2017
A uni-lateral soft exosuit for the paretic ankle can reduce compensations related to post-stroke gait Oral
Kudzia P. PhD Thesis. Simon Fraser University, School of Engineering Science. Supervisor: Dr. Maxwell Donelan. 2023
Developed computational models to measure the forces your body produces when walking, running, and jumping — without needing expensive lab equipment. Combined biomechanical modelling, machine learning, and wearable sensors to predict ground reaction forces from simple motion data.
Kudzia P. MASc Thesis. Queen's University, Department of Mechanical and Materials Engineering. Supervisor: Dr. Geneviève Dumas. 2015
Built a low-cost system using a Microsoft Kinect depth camera to estimate the mass, center of mass, and inertia of individual body segments — measurements traditionally requiring expensive motion capture labs. Validated the approach against gold-standard methods for use in clinical and field settings.
I design courses that connect engineering fundamentals to real research problems. Students collect and analyze their own biomechanics data, build computational models, and present findings — the same workflow they will use as engineers and researchers. I also supervise undergraduate thesis projects in computer vision and machine learning.
8
Courses
300+
Students
4.7
Avg. Eval (/5)
20+
Supervised
Course Instructor · UBC · 2023-2025
BMEG 230 · Instructor · Fall 2023, Fall 2024 · 4 credits
Application of mechanics to biological systems. Three major units: statics in biomechanics (free body diagrams, joint forces, muscle force estimation), dynamics in biomechanics (kinematics, kinetics, inverse dynamics, gait analysis), and tissue mechanics (bone, cartilage, ligament, tendon). Developed original content and organized 5 hands-on labs.
3D kinematics, gait, balance control, and biomechanical engineering. 4 hands-on labs.
▶
Advanced biomechanics: 3D rigid-body statics and dynamics, 3D gait analysis, indeterminate systems and optimization, biological tissue mechanics (ligaments, tendons, bone, cartilage, spinal discs), computational modeling (musculoskeletal and finite element), and biomechanical experimental methods. Flipped classroom with group activities. Developed original content and organized 4 labs.
3D DynamicsOptimizationFEAMuscle ModelsNeural ControlMotion Capture
Faculty-guided undergraduate research projects in biomechanics and computer vision.
▶
Supervised student research projects across computer vision, pose estimation, and biomechanics. Students proposed research questions, conducted literature reviews, collected and analyzed data, and presented findings. Deliverables included a research proposal, final report, and oral presentation.
Research MethodsLiterature ReviewPose EstimationComputer VisionData Analysis
Anatomy, physiology, and functional analysis of the human body.
▶
Co-instructed course covering human anatomy and physiology from an engineering perspective. Integrated structure-function relationships across the musculoskeletal, cardiovascular, and nervous systems.
AnatomyPhysiologyMusculoskeletalCardiovascularNervous System
Fourth-year capstone design projects supervised through to prototype.
▶
Supervised engineering design groups through fourth-year capstone projects. Students developed biomedical devices from needs finding through functional prototype, including design controls, user testing, and stakeholder presentations.
Motor control, neural rehabilitation, and movement disorders.
▶
Teaching assistant for 11 terms. Covered neural basis of movement control, rehabilitation strategies for neurological conditions, and motor learning principles. Supervised labs and led tutorial sessions.
Motor ControlRehabilitationNeuroplasticityMovement Disorders
BPK 870 · Lab Instructor · SFU · 2018
Experimental Methods in Physiology
Graduate-level experimental methods and physiological measurement.
▶
Laboratory instructor for graduate course covering experimental design, physiological data acquisition, signal processing, and statistical analysis of human physiology data.
Body composition measurement and anthropometric assessment.
▶
Laboratory instructor covering anthropometric measurement techniques, body composition analysis, and estimation of body segment parameters for biomechanical modeling.
Facilitated first-year engineering design teams through structured design process. Guided students in problem scoping, prototyping, and technical communication.
Introduction to programming for first-year engineering students.
▶
Led tutorial sessions teaching programming fundamentals to first-year engineering students. Covered problem solving, algorithm design, and implementation in MATLAB.
MATLABAlgorithmsProblem SolvingProgramming
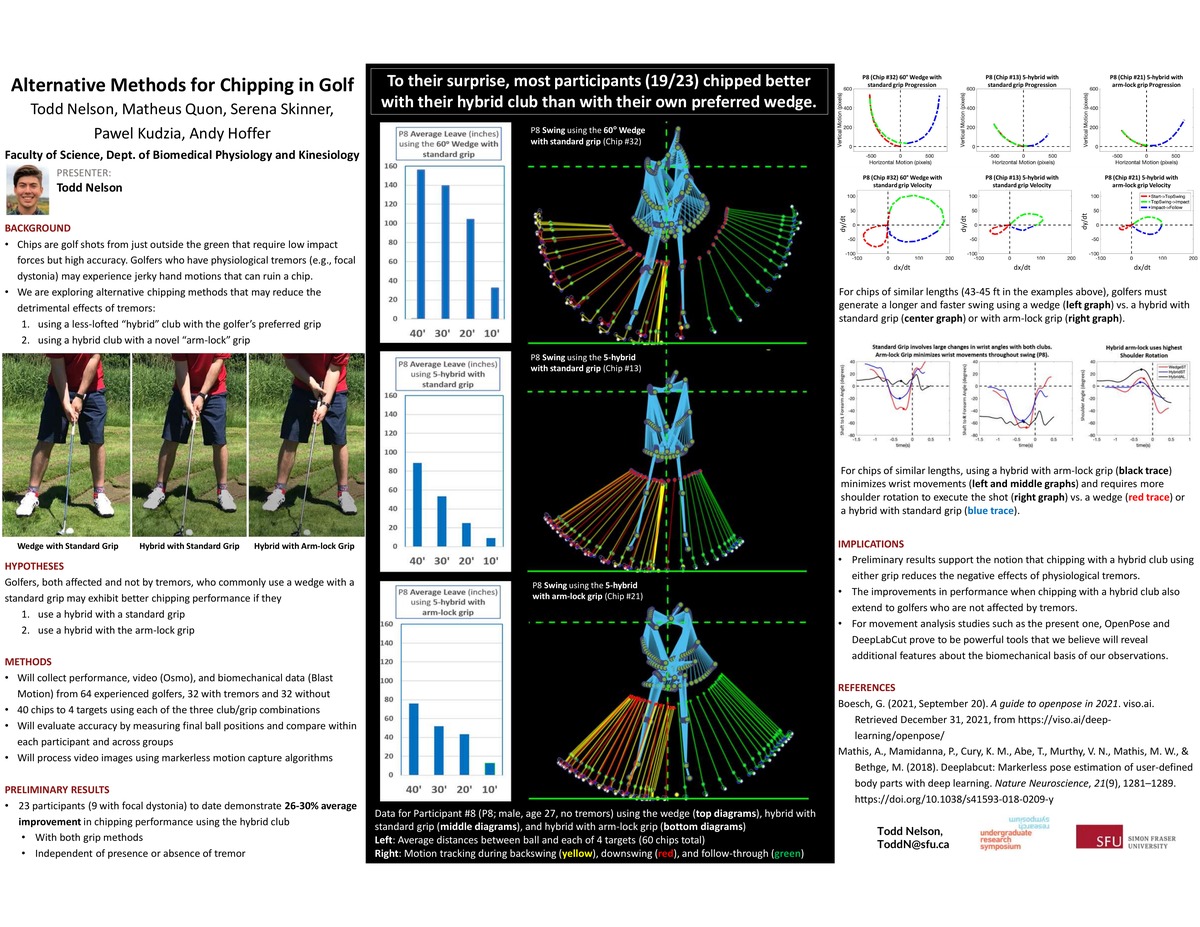
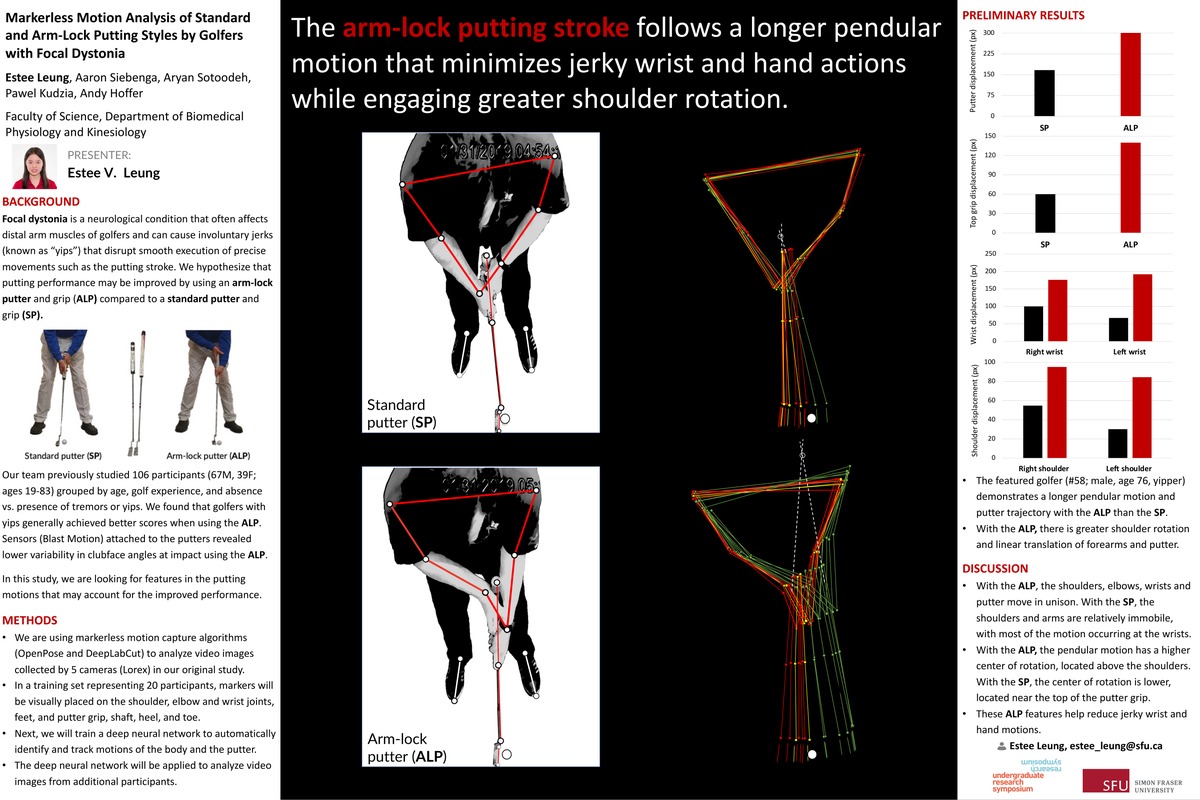
Supervised 13 undergraduate thesis students across UBC, SFU, and Harvard. Projects span computer vision for sports biomechanics, pose estimation, golf kinematics, exosuit gait analysis, and wearable sensor validation.
Engineering research leadership Built on technical roots.
I take on both leadership and hands-on technical roles, with previous work spanning Meta, Harvard, lululemon, and research labs across North America. Whether you need someone to direct a research program or to build the system itself, I work across the full stack from experiment to shipped product.
Leadership
Direct the program
Research direction & scientific strategy
Project management and delivery
Team coordination & technical mentorship
Advisory, technical review, grant strategy
Technical
Build the system
Wearable sensors & hardware prototyping
Computer vision & ML pipelines for movement
Agentic AI workflows and engineering automation
Experimental design, data analysis, publication
Domain expertise
Mechanical EngineeringPhysiology & BiomechanicsWearable SensorsRoboticsComputer Vision & MLAgentic AI Workflows
Tell me about your project. I'll reply within 48 hours.
Got it.
I'll reply within 48 hours. You can also reach me directly at .
Ventures
Beyond research and consulting, I build products that put biomechanics knowledge into the hands of practitioners, coaches, and everyday people.
Active
Core Motion
Co-Founder & CTO. Wearable biofeedback device for ACL rehabilitation. Real-time biomechanics analysis and center of mass tracking for return-to-sport decisions.
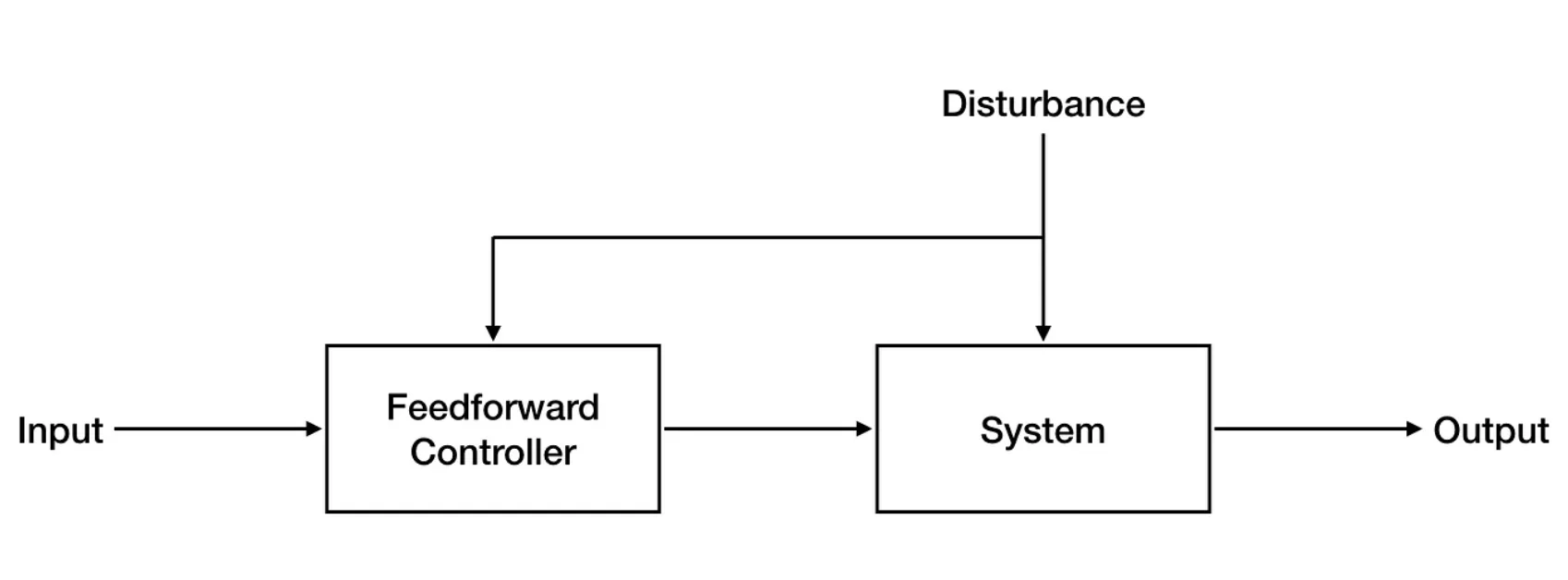
Feedforward control, or why movement is less reactive than you think
The brain commits to a movement before it happens. That has quiet but large implications for anyone building wearables, rehab tools, or coaching software.
Feedforward control sends motor commands based on a prediction of the upcoming state. Feedback loops correct the prediction when it is wrong — but they arrive late.
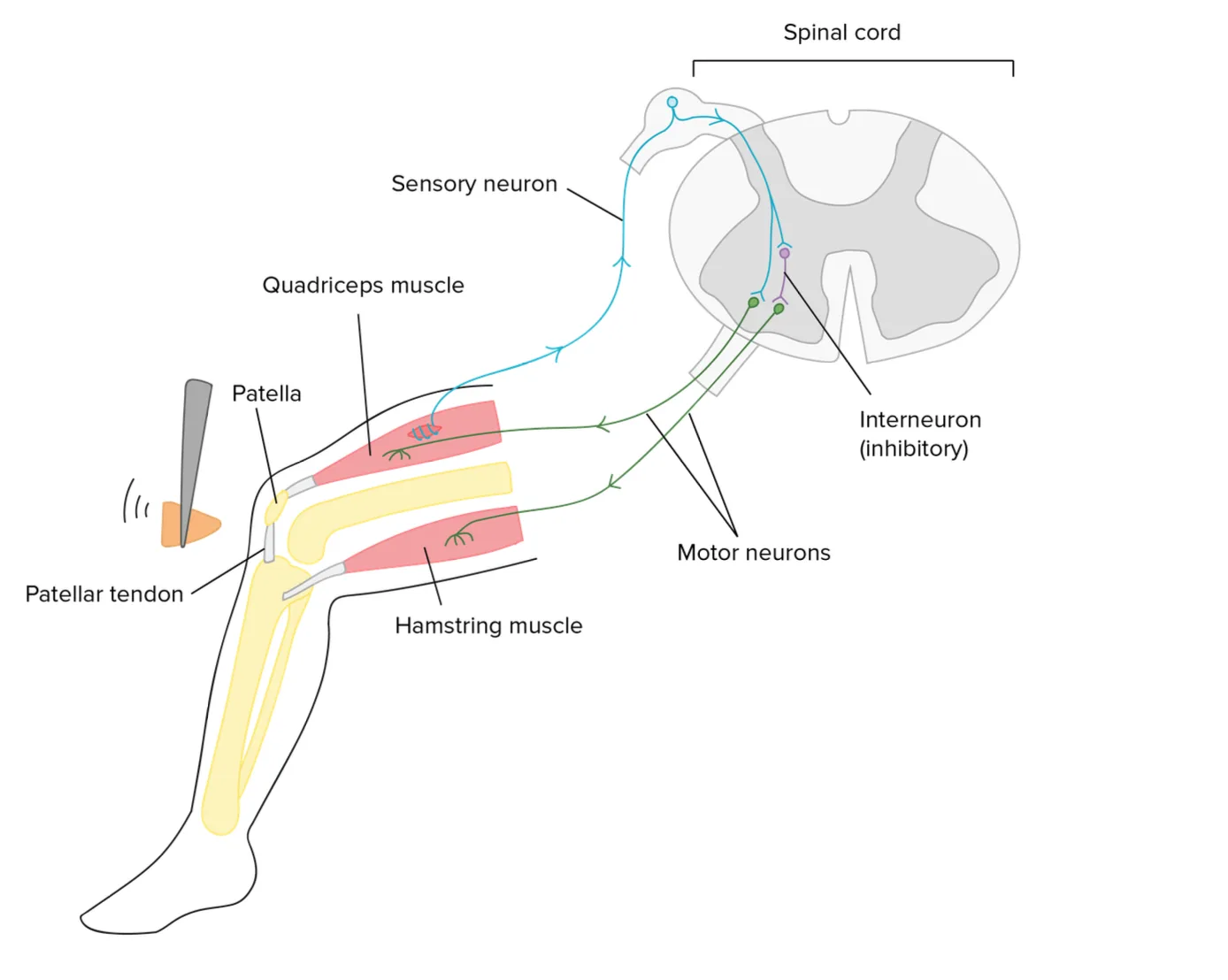
The first time I saw a person trip over a cable and catch themselves mid-step, I remember thinking the nervous system was extraordinarily fast. Stimulus, sensor, response, all in a few hundred milliseconds. It was the kind of observation that makes you respect reflexes. What I did not understand yet is that most of what I was watching was not a reflex at all. It was a plan.
Classical models of movement lean on a reactive picture. A stimulus arrives, a sensor notices it, a signal runs up the spinal cord, the cortex deliberates, and a muscle responds. The latency alone rules that picture out for most of what bodies do. A tennis serve takes about 120 milliseconds to arrive; a visual cortical response needs more than that just to register the ball's trajectory. If the return were reactive, it would always be late. And yet it is not.
Prediction is the main job
The thing the brain is actually doing, most of the time, is predicting. It builds an internal model of the body and the environment, forecasts the next slice of time, and sends motor commands that are already tuned to what it expects. Sensory feedback comes back late, but the prediction has given the muscles a head start. If the prediction is wrong, feedback corrects it. If it is right, the movement looks effortless and the feedback is almost unused.
This is feedforward control. It is not a replacement for feedback. It is the scaffold that feedback hangs on.
Movement is less like a thermostat reacting to temperature and more like a forecaster who has already packed a raincoat.
Why biomechanics researchers should care
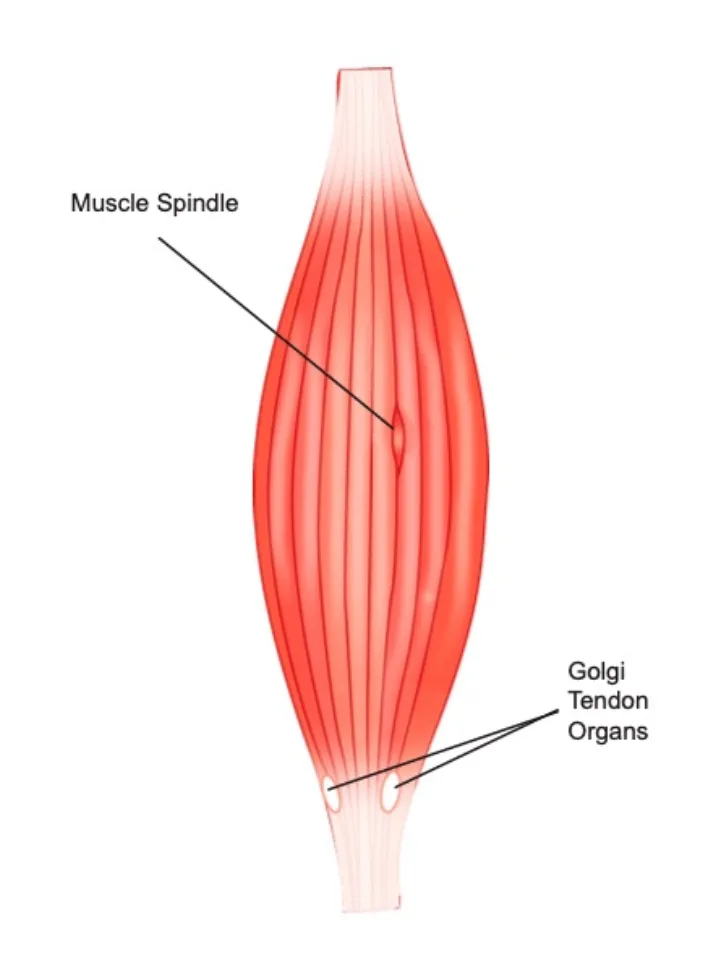
If you only study the muscle activations that follow a perturbation, you miss the part of the nervous system that decided what to do before the perturbation arrived. Pre-activation patterns in the lower limb before heel strike, co-contraction patterns the moment before a ball is caught, postural adjustments that precede a voluntary arm lift — these are the signature of a system that is predicting, not reacting. They are small, they are early, and they are easy to miss if your analysis starts at the event instead of before it.
Most of my favorite findings in this area come from running and hopping experiments where muscle activity is measured during the swing phase, well before the foot hits the ground. The timing of that activation tells you how stiff the leg is going to be at impact. That stiffness, in turn, shapes ground reaction forces, injury risk, and energetic cost. All of it is decided before contact.
Why this matters for wearables
The practical consequence is awkward for the wearables field. Most devices that promise to coach movement or prevent injury are reactive by design. They measure what already happened, classify it, and feed something back to the user a few seconds later. By the time the notification lands, the brain has moved on to planning the next three steps.
A more honest version of the problem is this: if we want a wearable to actually change movement, it has to engage with the planning layer, not just the output layer. That means either surfacing signals a person can internalize over many repetitions (so the prediction itself changes), or catching the earliest hint of a motor command before it executes. Electromyography, eye-gaze, and posture shifts are candidates for the latter. None of them are easy.
What I am circling
I keep coming back to this question because it touches almost everything I work on. The research pillars — video to biomechanics, lab to field, fundamentals of force control — all sit on the same substrate. You cannot build good measurement tools without knowing what a body is doing; and a body is rarely doing what the last millisecond of data implies.
Postdoctoral FellowUniversity of Victoria · 2025–Present
Wearables, Clinical Gait & Falls
Developing wearable IMU-based systems for clinical gait assessment and fall risk prediction in older adults.
Postdoctoral FellowUniversity of British Columbia · 2024–2025
Injury Prevention
Led research on sport injury biomechanics and co-founded Core Motion, a wearable biofeedback device for ACL rehabilitation.
PhD, Engineering ScienceSimon Fraser University · 2023
Engineering & Physiology
Built computational models to predict ground reaction forces during walking, running, and jumping using wearable sensors and machine learning — removing the need for expensive force plates.
MASc, Mechanical Eng.Queen's University · 2015
Biomedical Engineering
Developed a low-cost depth-camera system to estimate body segment mass and inertia properties, validated against gold-standard methods for clinical use.
Research FellowshipHarvard University · 2015–2017
Exoskeletons & Robotics
Quantified the rehabilitative effects of soft robotic exosuits for stroke survivors at the Biodesign Lab and Wyss Institute for Biologically Inspired Engineering.
BEng, Mechanical Eng.Queen's University · 2013
Biomechanics
Foundation in mechanical design, dynamics, and human biomechanics. Capstone project in ergonomic analysis and motion capture.
About
I combine biomechanics, engineering, and data-driven modeling to augment, restore, and deepen our understanding of human mobility. Over 10+ years at Meta, Harvard, Lululemon, and UBC, I have collected data on 1000+ participants across 15+ research protocols and co-authored findings in Science Translational Medicine with 1000+ citations.
I co-founded Core Motion, a medical device startup building wearable biofeedback for ACL rehabilitation. I teach biomechanics at UBC and supervise undergraduate research projects in computer vision and machine learning.
Outside the lab, I pursue endurance sports: trail ultra-marathons, ski mountaineering, climbing, and mountain biking in British Columbia's Coast Mountains.